Objects recognition based on long-range portraits
Essence
Comparison of long-range portraits registered by laser locator system with already known ones can be used for located object classification and its orientation determination relative observation frame of reference.
In case when we have not enough information about long-range portraits values distribution and its covariation it is possible to use neuronet algorithms for objects recognition.
Formed long-range portraits characteristic vector is recognized by previously trained neural network. This vector has stability properties to additive noise and invariance to amplitude and position of registered long-range portrait in observation interval. Neural network training output vectors are formed so, that obtained solution is adequate in selected basis.
Neural network classifier training carries out by the distributed computing environment, which is made as local area network. Such computing environment architecture allows using an ensemble from 104…105 values of attribute vector for neural classifier training. Such amount of values is used for training ensemble representativeness at main location parameters variation: laser radiation location pulse shape and length changes, objects pulse scattering signature, spatial position of directional radiation pattern centre.
 |
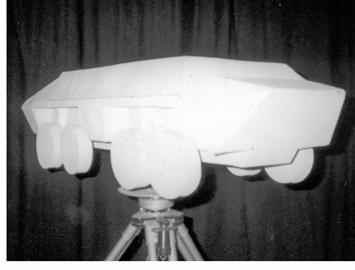 |
Experimentally registered long-range portraits
of fire cross-country vehicle from different angles.
Minimum right recognition probability of each angle is 0,92.
There are some questions while object recognition system synthesis by long-range portraits: recognition algorithm structuring; attribute space dimension selection; attribute space realization training ensemble selection. These questions must be scrutinized because of their direct influence on objects recognition quality. We have developed object surface scattering characteristic analysis, which provide minimum values of attribute vector metric. Training ensemble addition by such attribute vectors ensures object recognition with high quality in case when surface scattering characteristic is unknown a priory.
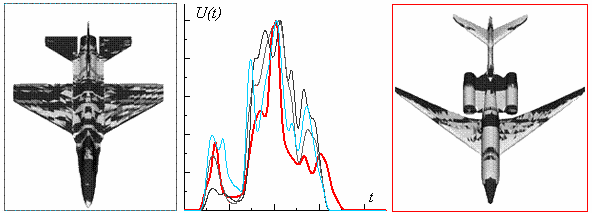
Surface parts scattering characteristics
and long-range portraits of two different airplane types.
It was shown, that object recognition based on long-range portraits with using of right trained neural network classify can be good and stable to main location parameters variation.
References
- E.V. Buryi, "Synthesis of an object recognition system based on the profile of the envelope of a laser pulse in pulsed lidars", QUANTUM ELECTRON, 1998, 28 (5).
- E.V. Buryi, A.E. Kosykh, "Experimental acquisition of long-range portraits of objects and their recognition", QUANTUM ELECTRON, 1998, 28 (10).
- E.V. Buryi, "Simulation methods of diffusion pulse characteristics of 3–D object in optical range, provided a coincident of simulated and experimental signs of recognition" // 5–th Int. Conf . ACS ’98. – Szczecin ( Poland ), 1998.
- Бурый Е.В., Смирнова Ю.Л. Формирование репрезентативного множества векторов признаков для обучения системы распознавания типов летательных аппаратов методом моделирования распределений коэффициентов рассеяния их поверхностей // Математическое моделирование, 2004. – Т 16, № 4.
- Бурый Е.В., Смирнова Ю.Л. Анализ устойчивости распознавания объектов в оптическом диапазоне при изменении характеристик рассеяния их поверхностей // Нейрокомпьютеры и их применение: Труды VIII Всеросс. конф. – М., 2002.
 Русский
Русский