Registration and analysis of long-range portraits
Fundamental idea
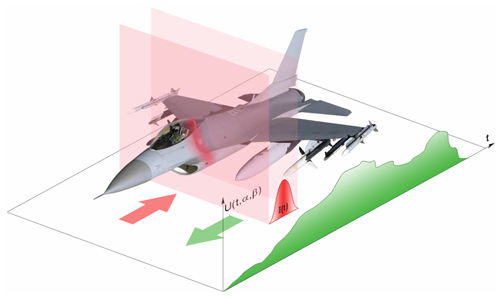
Long-range portrait is integral characteristic of an object. It depends on object’s observable angle, surface shape, radiation intensity distribution in object’s area and radiation propagation conditions. Comparison of recorded long-range portraits with already known ones can be used to classify object and determine it’s orientation relative to location system.
Long-range portrait have some merits as information source about located object:
- Radiation registration by one photo detector implies high energy efficiency;
- Radiation coherence is not required;
- Stability to scattering meteorological elements and meteorological channel turbulence.
Mathematical simulation of long-range portraits
Photocurrent pulse shape on the photodetector output depends on objects surface geometry when exposing laser pulse duration is smaller then the time of radiation propagation along objects surface:
 ,
,
where  – registered radiation intensity,
– registered radiation intensity,  – photodetector pulse response,
– photodetector pulse response,  – aspect ratio,
– aspect ratio,  – laser radiation pulse envelope,
– laser radiation pulse envelope,  – radiation track impulse response function,
– radiation track impulse response function,  – objects pulse scattering signature.
– objects pulse scattering signature.
When , , parameters is known, photocurrent pulse amplitude and time characteristics can be used for object surface dimensioning in pointing direction. Therefore  or corresponding voltage pulse
or corresponding voltage pulse
 ,
,
on the photodetector system output with  pulse response often named as long-range object portrait.
pulse response often named as long-range object portrait.
In account of a lot of factors, which affect range images, the most effective path of its detecting is computational modeling. We made bundled software which provides long-range portraits modeling for objects with arbitrary surface shape and different scattering signature of its parts in different location conditions.Range images drawing can be counted for different types of laser radiation sources with arbitrary positions of directional radiation pattern centers, different atmospheric propagation conditions and photodetector systems parameters. Adequacy of range images modeling confirmed by achieved experimental results.
Arbitrary surface shape objects range images modeling bundled software flowchart
Experimentally counted (black) and counted (red)
range images of cone with diffusing surface
References
- E.V. Buryi, "Synthesis of an object recognition system based on the profile of the envelope of a laser pulse in pulsed lidars", QUANTUM ELECTRON, 1998, 28 (5).
- E.V. Buryi, "Simulation methods of diffusion pulse characteristics of 3–D object in optical range, provided a coincident of simulated and experimental signs of recognition" // 5–th Int. Conf . ACS ’98. – Szczecin ( Poland ), 1998.
- E.V. Buryi, A.E. Kosykh, "Experimental acquisition of long-range portraits of objects and their recognition", QUANTUM ELECTRON, 1998, 28 (10)
 Русский
Русский